Електронний компас Структурна схема електронного компасу
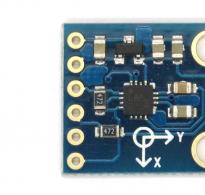
Кожен, хто пробував ставити на свого робота електронний компас ставив таке запитання: а як, власне, отримати з цього приладу якусь віртуальну стрілку, яка б показувала на північ? Якщо ми підключимо до Ардуїно найпопулярніший датчик HMC5883L, то отримаємо потік чисел, які поводяться дивним чином під час його обертання. Що робити з цими даними? Спробуймо розібратися, адже повноцінна навігація робота без компаса неможлива.  По-перше, пристрій, який часто називають компасом, насправді є магнітометром. Магнітометр це прилад, який вимірює напруженість магнітного поля. Всі сучасні електронні магнітометри виготовляються за технологією МЕМС і дозволяють проводити вимірювання відразу по трьох перпендикулярних осях. Так от той потік чисел, які видає прилад, — це насправді проекції магнітного поля на три осі у системі координат магнітометра. Такий же формат даних мають інші пристрої, що використовуються для позиціонування і навігації: акселерометр і гіротахометр (він же гіроскоп). На малюнку зображено простий випадок, коли компас розташований горизонтально на поверхні екватора. Червоною стрілкою відзначено напрямок до північного полюса. Пунктир відзначено проекції цієї стрілки на відповідні осі.
По-перше, пристрій, який часто називають компасом, насправді є магнітометром. Магнітометр це прилад, який вимірює напруженість магнітного поля. Всі сучасні електронні магнітометри виготовляються за технологією МЕМС і дозволяють проводити вимірювання відразу по трьох перпендикулярних осях. Так от той потік чисел, які видає прилад, — це насправді проекції магнітного поля на три осі у системі координат магнітометра. Такий же формат даних мають інші пристрої, що використовуються для позиціонування і навігації: акселерометр і гіротахометр (він же гіроскоп). На малюнку зображено простий випадок, коли компас розташований горизонтально на поверхні екватора. Червоною стрілкою відзначено напрямок до північного полюса. Пунктир відзначено проекції цієї стрілки на відповідні осі.  Здавалося б, ось воно! Катет дорівнює катету на тангенс протилежного кута. Для того, щоб отримати кут напряму, доведеться взяти арктангенс відносини катетів: H = atan(X/Y)Якщо ми проведемо ці нескладні обчислення, ми справді отримаємо якийсь результат. Жаль тільки, що ми все ще не отримаємо вірну відповідь, адже ми не врахували купу факторів:
Здавалося б, ось воно! Катет дорівнює катету на тангенс протилежного кута. Для того, щоб отримати кут напряму, доведеться взяти арктангенс відносини катетів: H = atan(X/Y)Якщо ми проведемо ці нескладні обчислення, ми справді отримаємо якийсь результат. Жаль тільки, що ми все ще не отримаємо вірну відповідь, адже ми не врахували купу факторів:
- Зміщення та спотворення вектора магнітного поля Землі, внаслідок зовнішніх впливів.
- Вплив тангажу та крену на показання компаса.
- Різниця між географічним та магнітним полюсами – магнітне відмінювання.
1. Візуалізація показань магнітометра
Як відомо, одна картинка краща за тисячу слів. Тому для більшої наочності скористаємося 3D-редактором для візуалізації показань магнітометра. Для цих цілей, можна використовувати SketchUp з плагіном "cloud" -515 211 -320 -515 209 -318 -514 213 -319 -516 Розділювачем може бути символ табуляції, пробіл, крапка з комою і т.п. Все це вказується у налаштуваннях плагіна. Там же можна попросити склеїти всі крапки трикутниками, що в нашому випадку не потрібно. Найпростіший спосіб зберегти показання магнітометра – передавати їх через COM-порт на персональний комп'ютер у монітор послідовного порту, з подальшим збереженням в текстовий файл. Другий спосіб – підключити до Ардуїно SD карту та записувати дані магнітометра у файл на SD карті. Розібравшись із записом даних та з імпортом їх у SketchUp, спробуємо тепер провести експеримент. Повертатимемо магнітометр навколо осі Z, а керуюча програма в цей час буде записувати показання датчика кожні 100 мс. Усього буде записано 500 точок. Результат цього експерименту наведено нижче: Що можна сказати, дивлячись на цей рисунок? По-перше, видно, що вісь Z дійсно була зафіксована — всі точки розташовані більш-менш у площині XY. По-друге, площина XY трохи нахилена, що може бути викликано або нахилом мого столу, або нахилом магнітного поля Землі 🙂 Тепер поглянемо на цю картину зверху
Що можна сказати, дивлячись на цей рисунок? По-перше, видно, що вісь Z дійсно була зафіксована — всі точки розташовані більш-менш у площині XY. По-друге, площина XY трохи нахилена, що може бути викликано або нахилом мого столу, або нахилом магнітного поля Землі 🙂 Тепер поглянемо на цю картину зверху  Перше, що впадає у вічі — центр координат знаходиться зовсім не в центрі окресленого кола! Швидше за все, магнітне поле, що вимірюється, чимось «зсунуто» убік. Причому це «щось» має напруженість, вища за неї біля природного поля Землі. Друге спостереження — коло трохи витягнуте у висоту, що вказує на більш серйозні проблеми, про які ми поговоримо нижче. А що вийде, якщо обертати компас довкола всіх осей одночасно? Правильно, вийде не коло, а сфера (точніше сфероїд). Ось така сфера вийшла у мене:
Перше, що впадає у вічі — центр координат знаходиться зовсім не в центрі окресленого кола! Швидше за все, магнітне поле, що вимірюється, чимось «зсунуто» убік. Причому це «щось» має напруженість, вища за неї біля природного поля Землі. Друге спостереження — коло трохи витягнуте у висоту, що вказує на більш серйозні проблеми, про які ми поговоримо нижче. А що вийде, якщо обертати компас довкола всіх осей одночасно? Правильно, вийде не коло, а сфера (точніше сфероїд). Ось така сфера вийшла у мене:  Додатково до основних 500 точок сфери, додано ще три масиви, по 500 точок у кожному. Кожна з доданих груп точок відповідає за обертання магнітометра довкола фіксованої осі. Так, нижнє коло отримано обертанням приладу навколо осі Z. Коло праворуч - обертанням навколо осі Y. Нарешті, щільне кільце крапок зліва відповідає за обертання магнітометра навколо осі X. Чому ці кола не оперізують кулю по екватору, читаємо нижче.
Додатково до основних 500 точок сфери, додано ще три масиви, по 500 точок у кожному. Кожна з доданих груп точок відповідає за обертання магнітометра довкола фіксованої осі. Так, нижнє коло отримано обертанням приладу навколо осі Z. Коло праворуч - обертанням навколо осі Y. Нарешті, щільне кільце крапок зліва відповідає за обертання магнітометра навколо осі X. Чому ці кола не оперізують кулю по екватору, читаємо нижче. 2. Магнітний спосіб
Насправді останній малюнок може здатися трохи дивним. Чому в горизонтальному стані датчик показує майже максимальне значення по осі Z?? Ситуація повторюється, якщо ми нахилимо прилад, наприклад, віссю X вниз — знову отримаємо максимальне значення (ліве коло). Виходить, що на датчик постійно діє поле, спрямоване крізь датчик вниз до поверхні землі! Нічого незвичайного в цьому насправді нема. Ця особливість магнітного поля землі називається магнітним способом. На екваторі поле спрямоване паралельно землі. У південній півкулі – вгору від землі під деяким кутом. А в північній півкулі, як ми вже спостерігали, вниз. Дивимося картинку. Магнітний спосіб ніяк не завадить нам користуватися компасом, тому не будемо про нього особливо замислюватися, а просто приймемо до відома це цікавий факт. Тепер перейдемо, безпосередньо до проблем.
Магнітний спосіб ніяк не завадить нам користуватися компасом, тому не будемо про нього особливо замислюватися, а просто приймемо до відома це цікавий факт. Тепер перейдемо, безпосередньо до проблем. 2.1. Спотворення магнітного поля: Hard & Soft Iron
У зарубіжній літературі спотворення магнітного поля прийнято ділити на дві групи: Hard Iron та Soft Iron. Нижче наведено картинку, що ілюструє суть цих спотворень. Hard IronДаю довідку. Інтенсивність магнітного поля землі залежить від земних координат, у яких воно вимірюється. Наприклад, у Кейп Тауні (Південна Африка) поле складає близько 0.256 Гс (Гаусс), а в Нью-Йорку вдвічі більше – 0.52 Гс. В цілому по планеті інтенсивність магнітного поля варіюється в діапазоні від 0.25 Гс до 0.65 Гс. Для порівняння, поле звичайного магнітика на холодильник складає 50 Гс, це в сто разів більше ніж магнітне поле в Нью Йорку!! Зрозуміло, що чуйний магнітометр може легко заплутатися, якщо поруч із ним виникне один із таких магнітів. На квадрокоптері, звичайно, таких магнітиків немає, зате є куди потужніші рідкісноземельні магніти вентильних двигунів, а також електронні ланцюги контролера, проводи живлення та акумуляторна батарея. Такі джерела паразитного магнітного поля називають Hard Iron. Впливаючи на магнітометр, вони надають деяке зміщення значенням, що вимірюються. Подивимося, чи є Hard Iron спотворення нашої сфери. Проекція точок сфери на площину XY виглядає так:
Hard IronДаю довідку. Інтенсивність магнітного поля землі залежить від земних координат, у яких воно вимірюється. Наприклад, у Кейп Тауні (Південна Африка) поле складає близько 0.256 Гс (Гаусс), а в Нью-Йорку вдвічі більше – 0.52 Гс. В цілому по планеті інтенсивність магнітного поля варіюється в діапазоні від 0.25 Гс до 0.65 Гс. Для порівняння, поле звичайного магнітика на холодильник складає 50 Гс, це в сто разів більше ніж магнітне поле в Нью Йорку!! Зрозуміло, що чуйний магнітометр може легко заплутатися, якщо поруч із ним виникне один із таких магнітів. На квадрокоптері, звичайно, таких магнітиків немає, зате є куди потужніші рідкісноземельні магніти вентильних двигунів, а також електронні ланцюги контролера, проводи живлення та акумуляторна батарея. Такі джерела паразитного магнітного поля називають Hard Iron. Впливаючи на магнітометр, вони надають деяке зміщення значенням, що вимірюються. Подивимося, чи є Hard Iron спотворення нашої сфери. Проекція точок сфери на площину XY виглядає так:  Видно, що хмара точок має деяке помітне зміщення осі Y вліво. По осі Z зміщення практично відсутнє. Ліквідувати таке спотворення дуже просто: достатньо збільшити або зменшити значення, що одержуються від приладу, на величину зміщення. Наприклад, калібрування Hard Iron для осі Y матиме вигляд: Ycal_hard = Y - Ybiasде Ycal_hard- каліброване значення; Y- Вихідне значення; Ybias- Величина зміщення. Щоб обчислити Ybias, нам потрібно зафіксувати максимальне та мінімальне значення Y, а потім скористатися простим виразом: Ybias = (Ymin-Ymax) / 2 - Yminде Ybias- Шукана величина зміщення; Ymin- Мінімальне значення осі Y; Ymax- Максимальне значення осі Y. Soft IronНа відміну від Hard Iron, спотворення типу Soft носить більш підступний характер. Знову ж таки, простежимо цей вид впливу на зібрані раніше дані. Для цього звернемо увагу на те, що куля на картинці зверху, і не куля зовсім. Його проекція на вісь YZ трохи сплющена зверху, і трохи повернута проти годинникової стрілки. Викликано ці спотворення, наявністю феромагнітних матеріалів поруч із датчиком. Таким матеріалом є металева рама квадрокоптера, корпус двигуна, проводка або навіть металеві болти кріплення. Виправити ситуацію зі сплющеністю допоможе множення показань датчика на деякий множник: Ycal_soft = Y * Yscaleде Ycal_hard- каліброване значення; Y- Вихідне значення; Yscale- Коефіцієнт масштабування. Для того щоб знайти всі коефіцієнти (для X, Y та Z) необхідно виявити вісь з найбільшою різницею між максимальним і мінімальним значенням, а потім скористатися формулою: Yscale = (Amax-Amin)/(Ymax-Ymin)де Yscale- Коефіцієнт спотворення по осі Y; Amax- Максимальне значення на деякій осі; Amin- Мінімальне значення на деякій осі; Ymax- Максимальне значення на осі Y; Ymin— мінімальне значення на осі Y. Інша проблема, через яку сфера виявилася повернутою, усувається трохи складніше. Проте, внесок такого спотворення у загальну помилку виміру досить малий, і ми детально розписуватимемо спосіб його «ручного» нівелювання.
Видно, що хмара точок має деяке помітне зміщення осі Y вліво. По осі Z зміщення практично відсутнє. Ліквідувати таке спотворення дуже просто: достатньо збільшити або зменшити значення, що одержуються від приладу, на величину зміщення. Наприклад, калібрування Hard Iron для осі Y матиме вигляд: Ycal_hard = Y - Ybiasде Ycal_hard- каліброване значення; Y- Вихідне значення; Ybias- Величина зміщення. Щоб обчислити Ybias, нам потрібно зафіксувати максимальне та мінімальне значення Y, а потім скористатися простим виразом: Ybias = (Ymin-Ymax) / 2 - Yminде Ybias- Шукана величина зміщення; Ymin- Мінімальне значення осі Y; Ymax- Максимальне значення осі Y. Soft IronНа відміну від Hard Iron, спотворення типу Soft носить більш підступний характер. Знову ж таки, простежимо цей вид впливу на зібрані раніше дані. Для цього звернемо увагу на те, що куля на картинці зверху, і не куля зовсім. Його проекція на вісь YZ трохи сплющена зверху, і трохи повернута проти годинникової стрілки. Викликано ці спотворення, наявністю феромагнітних матеріалів поруч із датчиком. Таким матеріалом є металева рама квадрокоптера, корпус двигуна, проводка або навіть металеві болти кріплення. Виправити ситуацію зі сплющеністю допоможе множення показань датчика на деякий множник: Ycal_soft = Y * Yscaleде Ycal_hard- каліброване значення; Y- Вихідне значення; Yscale- Коефіцієнт масштабування. Для того щоб знайти всі коефіцієнти (для X, Y та Z) необхідно виявити вісь з найбільшою різницею між максимальним і мінімальним значенням, а потім скористатися формулою: Yscale = (Amax-Amin)/(Ymax-Ymin)де Yscale- Коефіцієнт спотворення по осі Y; Amax- Максимальне значення на деякій осі; Amin- Мінімальне значення на деякій осі; Ymax- Максимальне значення на осі Y; Ymin— мінімальне значення на осі Y. Інша проблема, через яку сфера виявилася повернутою, усувається трохи складніше. Проте, внесок такого спотворення у загальну помилку виміру досить малий, і ми детально розписуватимемо спосіб його «ручного» нівелювання. 2.2. Автоматичне калібрування
Треба сказати, отримання вручну точних мінімальних та максимальних показань магнітометра завдання не з простих. Для цієї процедури, як мінімум, буде потрібний спеціальний стенд, в якому можна фіксувати одну з осей приладу. Набагато простіше скористатися автоматичним алгоритмом калібрування. Суть цього методу полягає в апроксимації хмари отриманих точок еліпсоїдом. Іншими словами, ми підбираємо параметри еліпсоїда таким чином, щоб він максимально точно збігався з нашою хмарою точок, побудованих на основі показань магнітометра. З підібраних таким чином параметрів ми зможемо видобути величину зміщення, коефіцієнти масштабу та коефіцієнти для ортогоналізації осей. В інтернеті можна знайти кілька програм, придатних для цього. Наприклад, MagCal, або ще одна – Magneto. На відміну від MagCal, Magneto розраховані параметри виводяться в готовому до використання вигляді, без необхідності додаткових перетворень. Саме цією програмою ми й скористаємося. Головна та єдина форма програми виглядає наступним чином: У полі "Raw magnetic measurements" вибираємо файл з вихідними даними. У полі "Norm of Magnetic or Gravitational field" вводимо величину магнітного поля Землі у точці нашої дислокації. Враховуючи, що цей параметр ніяк не впливає на кут відхилення стрілки нашого віртуального компаса, я поставив значення 1090, що відповідає 1 Гаусс. Потім тиснемо кнопку Calibrate і отримуємо:
У полі "Raw magnetic measurements" вибираємо файл з вихідними даними. У полі "Norm of Magnetic or Gravitational field" вводимо величину магнітного поля Землі у точці нашої дислокації. Враховуючи, що цей параметр ніяк не впливає на кут відхилення стрілки нашого віртуального компаса, я поставив значення 1090, що відповідає 1 Гаусс. Потім тиснемо кнопку Calibrate і отримуємо: - значення зміщення по всіх трьох осях: Combined bias (b);
- та матрицю масштабу та ортогоналізації: Correction for combined scale factors, misalignments and soft iron (A-1).
3. Вплив нахилу магнітометра на напрямок, що обчислюється.
На черзі проблема номера два. На початку статті ми вже спробували вирахувати кут між північчю та стрілкою компаса. Для цього годиться проста формула: H = atan(Y/X)де H- Кут відхилення стрілки компаса від північного напрямку; X,Y- Калібровані значення магнітометра. Уявимо тепер, що ми фіксуємо вісь X строго у напрямку північ, і починаємо обертати датчик навколо цієї осі (надаємо крен). Виходить, що проекція поля на вісь X залишається незмінною, тоді як проекція на Y змінюється. Згідно з формулою, стрілка компаса показуватиме або на північний захід, або на північний схід, залежно від того, в який бік робимо крен. Це і є, заявлена на початку статті друга проблема електронного компасу. Вирішити проблему допоможе геометрія. Нам потрібно лише повернути магнітний вектор у систему координат, задану інклінометром. Для цього по черзі перемножимо дві матриці косінусів на вектор: Vcal2 = Ry * Rx * Vcalде Vcal- Магнітний вектор, очищений від Hard і Soft спотворень; Rxі Ry- матриці повороту навколо осей X та Y; Vcal2- Магнітний вектор, очищений від впливу крену та тангажу. Придатна для програми контролера формула матиме вигляд: Xcal2 = Xcal * cos (pitch) + Ycal * sin (roll) * sin (pitch) + Zcal * cos (roll) * sin (pitch) Ycal2 = Ycal * cos (roll) - Zcal * sin (roll) H = atan2(-Ycal2, Xcal2)де rollі pitch- Нахили навколо осей X і Y; Xcal,Ycal,Zcal- Вектор магнітометра (Vcal); Ycal2, Ycal2- калібровані значення магнітометра (Zcal2 не вважаємо - він нам не знадобиться); H- Кут між північчю і стрілкою компаса. (Про те, хто такий atan2 можна дізнатися тут: http://en.wikipedia.org/wiki/Atan2)3. Різниця між географічним та магнітним полюсом
Після того як ми отримали більш менш точний кут відхилення стрілки компаса від північного напрямку, настав час усунути ще одну проблему. Справа в тому, що магнітний і географічний полюси на нашій планеті сильно відрізняються, залежно від того, де ми виробляємо вимірювання. Іншими словами, «північ» на який показує ваш похідний компас, зовсім не та північ де льоди і білі ведмеді. Для нівелювання цих відмінностей до показань датчика необхідно додати (або відняти) певний кут, званий магнітним відмінюванням. Наприклад, в Єкатеринбурзі магнітне відмінювання має величину +14 градусів, а значить виміряні показання магнітометра слід зменшити на ці 14 градусів. Для того, щоб з'ясувати магнітне відмінювання у ваших координатах, можна скористатися спеціальним ресурсом: http://magnetic-declination.com/Висновок
На закінчення кілька порад щодо навігації за допомогою магнітометра.- Калібрування повинне проводитися саме в тих умовах, в яких безпілотник здійснюватиме реальний політ.
- Магнітометр краще виносити з корпусу робота на штанзі. Так на нього впливатиме менше шумів.
- Для обчислення напрямку краще використовувати зв'язок компас + гіроскоп. При цьому їх показання поєднуються за певним правилом (data fusion).
- Якщо йдеться про літальний апарат з великою курсовою швидкістю, рекомендується використовувати зв'язок компас + гіроскоп + GPS.
Доброго дня. У мобільні телефони автори часто вбудовують компас. Але, що це, і навіщо він потрібен, не всі користувачі смартфонів мають уявлення. Тому, у цій статті, ми намагатимемося докладніше розглянути цю програму телефону, і, якщо її у вашому пристрої немає, розглянемо, як її завантажити.
Які бувають компаси
Що таке компас, ми пам'ятаємо всі з курсу шкільної географії. Але, давайте глибше копнемо це питання. Люди вигадали різні прилади, які дозволяють зрозуміти, де знаходяться полюси. Головне у цій справі зрозуміти, де знаходиться північ. Далі, знаючи розташування північного полюса, можна дізнатися, де знаходяться інші напрямки світла. Навіщо нам це потрібне? Щоб не заблукати на місцевості. Наприклад, у лісі, у полі, або перебуваючи на яхті в морі.
Наприклад, ви знаєте, як визначити полюси в лісі, маючи в підручних засобах звичайну голку? Потрібно акуратно покласти маленьку голочку на водну плівку (на водній гладі є найтонша плівка, саме по ній бігають довгоніжки) або можна просто покласти її на маленький листок рослини (або невеликого паперу).

Сам же лист акуратно покласти на воду у фарфоровій (пластиковій) тарілці (або в калюжі, якщо ви в лісі). Отже, одне із кінців голки прийме напрям північ, інший, на південь. Все дуже просто. Навіщо я це сказав? Даний метод може допомогти вам, якщо ви знаходитесь в незнайомій місцевості і не знаєте напряму сторін. У вас немає компаса, але є невелика калюжа і звичайна голка! Вам залишиться тільки зрозуміти, який саме з кінців голки вказує на північ!
Види компасів
Магнітний – усім знайомий компас із шкільного курсу. Суть його зводиться до визначення магнітного північного полюса магнітним полем. Далі, з шкали приладу, легко визначаються інші частини світла.
Є дуже красиві компаси, які мають одне задоволення. Наприклад, купити гарний компас Eyeskey Professional

ви можете тут. Доставка безкоштовна, варіантів багато. Той, що на зображенні, я подарував другу на день народження. Він затятий рибалка. Від компасу він був у захваті.
Електромагнітний

Суть його роботи у створенні поля через рух приладу у просторі. Його встановлюють у різні транспортні засоби, на кшталт кораблів, літаків та інших механізмів. Тут є одна умова, щоб компас почав функціонувати, потрібний рух цього механізму. Без руху не з'явиться електрика і його величина не покаже потрібних даних на приладі.
Цифровий компас
Його дія схожа на різновид звичайного класичного. Відмінність у тому, що в ньому немає стрілки, але є датчик, який використовує магнітне поле. Дані із датчика йдуть на циферблат. У подібних компасах часто є інші можливості. Досить часто такі прилади можуть заміряти кроки, тиск. Працювати він може як барометр, годинник та інше. Недолік – закінчення заряду батареї.

Наприклад, той, що на скріншоті є також і барометром. Докладніше про нього за посиланням…
Радіокомпас

Для цього різновиду компасів немає потреби в магнітному полі. У зв'язку з тим, що дані надходять безпосередньо зі спеціальних вишок. Раніше такий механізм досить часто застосовували в літаках. Але, останнім часом, від них все частіше відмовляються, оскільки досить часті стали відмінності інформації через спотворення радіохвиль.
Супутниковий

Як відомо з назви, дані він отримує зі спеціальних супутників. Що цікаво, цей вид компаса показує напрямок не на магнітні полюси, а на реальні, географічні. Іншими словами, він найточніший. Але є й недоліки. За поганої погоди, інформація може спотворюватися. Також інформація може бути не точною, якщо людина знаходиться під землею.
Саме цей вид компасів, спільно з цифровими, вбудовують у телефони та різні планшети. Сигнали вони приймають прямо із супутників. Зараз у більшості смартфонів даний вид компасу вбудований за замовчуванням. Іншими словами, завантажувати його з різних сервісів немає потреби. Достатньо увійти в налаштування та активувати цю функцію.

Також цей компас часто нерозривно пов'язаний з навігатором у телефоні. Якщо у вас в стільниковому є навігатор, то, зрозуміло, є і компас.

Якщо ж у вашому телефоні відсутня дана програма, скачати компас безкоштовно можна з play.google.com. На фото ви бачите Compass Galaxy.

Якщо вас ця модель не влаштовує, на цій сторінці є інші варіанти телефонного компаса. Вибирайте той, який вам більше сподобався.
Важливо:— Я не знаю, яка у вас модель телефону. Але щоб працював компас у телефоні, необхідно, щоб у вашому гаджеті була встановлена функція магнітного датчика. Якщо її немає, необхідно підключитися до геолокації GPS. Або, іншими словами, підключити магнітний гіроскоп. Зрозуміло, якщо це дозволяє модель телефону, про що ви можете дізнатися з його інструкції. Успіхів!
У зв'язку з широким розповсюдженням мобільної платформи android і gps чіпів у складі кінцевих продуктів, зокрема, я зацікавився ідеєю роботи цифрового компаса, навколо якого зараз виникає так багато питань.
Отже, аналізований нами об'єкт є компас, основою якого покладено принцип побудови визначенні координат, з допомогою супутникових навігаційних систем. Однак у практиці трапляються випадки, коли компас має у своєму складі як приймач блок магніторезисторів (принцип зміни опору від положення об'єкта в абсолютному просторі) або елементів Холла. Елементи Холла ж будуються з урахуванням мікромеханічних систем, високочутливих до зміни магнітного поля у разі зміна розподілу зарядів на кремнієвої пластині під впливом магнітного поля Землі. Прилади на магніторезисторах і елементах Холла уособлюють компас у його класичному вигляді, як автономний вимірювальний інструмент, на відміну від систем «збирального» типу, вхідна інформація для яких надходить безпосередньо у вигляді супутникового сигналу. Через війну системи, зав'язані зовнішньому джерелі інформації насправді є приладами з індикацією колійного кута як компаса.
Так як на практиці ми маємо справу найчастіше з визначенням розташування та спрямування за допомогою саме навігаційних систем, прикладом тому хоча б android з його додатком google maps, далі наведеться принцип роботи алгоритму саме такого випадку використання:
1. За сигналами із супутників знімаємо показання координат приймача системи супутникової навігації (і, відповідно, об'єкта)
2. Засікаємо момент часу, коли було зроблено визначення координат.
3. Чекаємо деякий інтервал часу, досить короткий для якісніших результатів.
4. Повторно визначається місце розташування об'єкта.
5. Вирішується просте навігаційне завдання обчислення вектора швидкості руху з отриманих координат двох точок та розміру часового інтервалу, після чого, знаючи вектор, ми з легкістю отримуємо:
а) напрямок руху
б) швидкість руху
6. Здійснюється перехід до кроку 2.
Як бачимо, робота алгоритму забезпечується циклічно і відправною точкою для початку наступного вектора буде кінець напрямного вектора за останній часовий інтервал.
Недоліки цього, у застосуванні цифрового компасування:
якщо об'єкт нерухомий в абсолютному просторі, напрям руху дізнатися не вийде, точки фіксування координат збігаються в даному випадку.
Як виняток досить великі об'єкти (наприклад, великі морські судна), де можна встановити 2 приймачі (наприклад, на носі та кормі). Таким чином, координати двох точок можна отримати відразу, навіть якщо об'єкт нерухомий, і перейти до пункту 5.
Також треба брати до уваги точність визначення координат супутниковими системами позиціонування та її впливом геть тихохідні об'єкти, внаслідок розкиду помилок позиціонування.
До недавнього часу в геодезіїв основному використовувалися компаси та бусолі, де чутливим елементом є намагнічена голка, що обертається на стрижні та використовується в різних модифікаціях цих приладів вже кілька тисячоліть. При орієнтуванні голка приймає таке положення, що її площина стає паралельна лініям магнітного поля, що проходять у цьому місці. Якщо голка має два ступені свободи, тобто може обертатися в горизонтальній та вертикальній площинах, то напрям, в якому вказує голка, буде показувати і відмінювання, і ухил локального геомагнітного поля. У багатьох приладах, щоб голка точно показувала напрям на північний магнітний полюс, її зазвичай врівноважують спеціально під особливості магнітного поля того регіону, в якому компас буде експлуатуватися.
Іноді використовують компаси з глобальним балансуванням, які можуть бути використані по всьому світу. Для демпфування коливань голки під час руху компас заповнюється рідиною (суміш води з алкоголем чи очищеним маслом). Показання таких приладів обтяжені помилками через вплив зовнішніх впливів, таких як вібрація, нахил, прискорення та зовнішні магнітні поля. Традиційні компаси та бусолі складно пристосувати до цифрового зчитування, а отже, складно використовувати в комплексі з новітніми геодезичними приладами.
У сучасних електронних компасахяк чутливий елемент використовуються магнітометри, які є, як і компас, аналоговими приладами та вимірюють інтенсивність однієї або кількох складових магнітного поля Землі в тій точці, де він знаходиться. Сигнали з виходу магнітометра перетворюються на цифрову форму і можуть бути використані для подальшої обробки процесором. У сучасних приладах переважно використовуються магнітометри, в яких використовуються магніторезистивні та магнітоіндуктивні датчики, датчики на основі ефекту Холла, а також датчики, виготовлені за технологією «fluxgate». Для орієнтування зазвичай використовується електронний компас, який має два магнітометри, встановлених в горизонтальній площині під прямим кутом один до одного, щоб вимірювати одну з компонентів магнітного поля В х або В y відповідно по осі х або по осі у. Кут між віссю х і магнітним меридіаном дорівнюватиме:
ψ = arctg(By/Bx). (7.1)
Сучасні магнетометри мають невеликі розміри та вбудовуються в інтегральні мікросхеми.
У деякі геодезичні приладивбудовуються анізотропні магніторезистивні (AMP) датчики, що являють собою спеціальні резистори, зроблені з тонкої пермалоєвої плівки, вектор намагнічування якої при попаданні в зовнішнє магнітне поле починає обертатися або змінювати кут змінюючи опір плівки. При вимірюваннях таку плівку поміщають у міст Уітсона і оцінюють зміну напруги, викликане зміною опору плівки, яким оцінюють силу впливу магнітного поля. Магніторезистивні датчики забезпечують точність, що перевищує один градус, і можуть мати одну, дві або три осі, і вбудовують їх в електронні компаси.
Багато супутникові приймачі мають аналогічні вбудовані електронні компаси. У супутникових приймачах зазвичай використовують двоосьовий компас, а в деяких випадках - триосьові датчики напрямків, які дозволяють отримувати досить точні напрямки навіть у разі невеликого нахилу. У тому випадку, коли супутниковий приймач рухається зі швидкістю понад 10 км/год, він за супутниковими спостереженнями може визначати напрямок свого руху з помилкою менше одного градуса. При менших швидкостях руху GPS-приймач у комплекті з однією антеною не здатний визначити напрямок руху. Тому приймач налаштовують так, щоб при досягненні ним певної швидкості (наприклад, 5 або 10 км на годину), він перемикався б з функції напрямку компасу на функцію напрямку, отриманого з супутникових спостережень, виконаних самим GPS-приймачем, а при зменшенні швидкості руху приймач повертався до напряму компаса.
Щоб супутниковий приймач міг обчислювати як географічний (істинний), і магнітний азимути руху, приймач вбудовують програмне забезпечення, що містить параметри моделі основного геомагнітного поля Землі. Приймач безперервно оновлює інформацію про направлення на об'єкт у міру того, як користувач рухається довільним шляхом до об'єкта.
Магнітоіндуктивні датчики напряму з'явилися порівняно недавно - перший патент на них було видано 1989 року. Принцип його роботи полягає в тому, що у генераторі коливань використовується котушка, індуктивність якої змінюється під впливом зміни навколишнього магнітного поля. Зміна індуктивності котушки викликає зміну частоти генератора. Таким чином, магнітометр такого типу вимірює магнітне поле за його впливом на індуктивність котушки дроту або соленоїда.
Для визначення напрямку на північний магнітний полюс (в горизонтальній площині) два таких датчики, встановлених перпендикулярно один одному, закріплюють на карданному підвісі, щоб вони розташовувалися в горизонтальній площині, а в осьовому триосьовому використовується ще й креномер. Багато сучасних автомобільних компасів виробляються на основі магнітоіндуктивних датчиків.
Коли вибираєшся за місто, то звична річ на зразок смартфона вже не допомагає. Необхідний надійний пристрій, який допомагає зорієнтуватися в просторі (а часом і в часі), а також отримати іншу важливу інформацію. Причому пристрій має бути максимально легким, компактним і, якщо вже на те пішло, багатофункціональним. Цей цифровий компас саме такий. З ним (і із зарядженими батарейками в запасі) не заблукаєш, точно визначиш точку, в якій перебуваєш, а значить зрозумієш, куди рухатися далі.
Пристрій важить значно менше 100 грам, зручно і легко лежить у руці, має кілька вбудованих датчиків, рідкокристалічний дисплей та можливість зберігати історію останніх зафіксованих даних (до 8 позицій). Зручний шнурок для підвішування на шию та світлодіодний елемент для підсвічування у темряві доповнюють базові можливості до комфортного рівня.
Вбудовані функції:
- годинник;
- календар;
- термометр;
- барометр;
- висотомір;
- компас;
- погодний датчик.
А все разом дає можливість не лише визначати координати свого місцезнаходження, а й прокладати вірний курс до призначення.
Годинник та календар
Із цими зрозумілими навіть дітям лічильниками все просто. Якось встановлюєте правильні дату та час і відстежуєте поточний момент. Можна вибрати 12-годинний або 24-годинний формат часу. Натискання кнопки SET дозволяє переходити від часу до дати. А довге натискання кнопки SET дозволяє увійти в режим налаштувань, у якому можна встановити дату/час, а також вибрати звичні одиниці виміру.
Термометр
Температура може з'являтися як у градусах Цельсія, і у градусах Фаренгейта. Є також кілька варіантів визначення стану погоди найближчим часом: ясно, переважно хмарно, хмарно та опади. Інформація оновлюється кожні 30 секунд.
Барометр
Значення атмосферного тиску, як і час із датою та поточною температурою, відображається на дисплеї у стандартному режимі. Інформація оновлюється раз на 30 секунд. Якщо потрібні точні дані, необхідно натиснути та утримувати кнопки SET та ALTI. Атмосферний тиск може відображатись як у міліметрах ртутного стовпа, так і у Гекто-Паскалях.
Висотомір
Натискання кнопки ALTI переводить у режим вимірювання абсолютної висоти (ABS). Дані оновлюються кожні 5 секунд. Утримання кнопки ALTI переводить у режим вимірювання порівняльної висоти (REL), показання у своїй скидаються на 0. Висоту можна заміряти як і метрах, і у футах.
Компас
Натискання на кнопку COMP дозволяє перейти в режим компасу. Утримання тієї ж кнопки переводить у режим перевірки. Про те, як це робити, докладно розказано у супровідній інструкції. При вимірі напрямку слід тримати компас далеко від впливу магнітних полів. Спотворення можуть відбуватися через інші магніти поблизу, а також через залізні та сталеві предмети.
Загалом з таким ручним електронним помічником ви не загубитеся. Ще раз нагадаємо про запас батарейок. Тут використовуються "мізинчикові".
Подарунок мандрівникові
Таку корисну річ, звичайно, оцінить той, хто любить надовго йти в похід, особливо в гористій місцевості. А ще йому можуть пригодитися крокомір та мультитул 4 в 1 . У мультитулі є потужний ліхтар, лампа-нічник, вентилятор та музичний пристрій (відтворення MP3-файлів та радіо). Під час стоянок та у темряві дуже рятує.
Характеристики
- 7 в 1: годинник, календар, термометр, погодний датчик, компас, висотомір, барометр;
- інструкція додається;
- РК-дисплей;
- підсвічування світлодіодним сигналом протягом 5 секунд;
- збереження та перегляд історії попередніх значень;
- розміри: 6.5 х 2.5 х 10 см;
- вага: 85 г;
- період оновлення даних: 30 секунд;
- температурний діапазон: від -10 °C до 50 °C (14-122 °F);
- діапазон висоти: від -305 м до 9144 м (-1 000-30 000 футів);
- діапазон атмосферного тиску: від 225 мм рт до 788 мм рт ст (301-1 051 гПа);
- працює від 2 ААА ("мізинчикових") батарейок (немає в комплекті);
- є шнурок;
- бренд: LeFutur;
- упакування: фірмова коробка;
- розміри коробки: 7 х 11 х 3 см.