Elektronski kompas.
Lokalna mreža  Svatko tko je pokušao instalirati elektronički kompas na svog robota postavio je sljedeće pitanje: kako se, zapravo, od ovog uređaja može dobiti svojevrsna virtualna strelica koja bi pokazivala prema sjeveru? Spojimo li najpopularniji HMC5883L senzor na Arduino, dobit ćemo tok brojeva koji se čudno ponaša kada se on okreće. Što učiniti s ovim podacima? Pokušajmo to shvatiti, jer potpuna robotska navigacija je nemoguća bez kompasa.
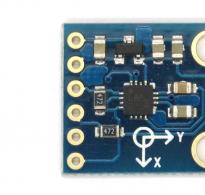
Svatko tko je pokušao instalirati elektronički kompas na svog robota postavio je sljedeće pitanje: kako se, zapravo, od ovog uređaja može dobiti svojevrsna virtualna strelica koja bi pokazivala prema sjeveru? Spojimo li najpopularniji HMC5883L senzor na Arduino, dobit ćemo tok brojeva koji se čudno ponaša kada se on okreće. Što učiniti s ovim podacima? Pokušajmo to shvatiti, jer potpuna robotska navigacija je nemoguća bez kompasa.  Prvo, uređaj koji se često naziva kompasom zapravo je magnetometar. Magnetometar je uređaj koji mjeri jakost magnetskog polja. Svi suvremeni elektronički magnetometri proizvedeni su korištenjem MEMS tehnologije i omogućuju mjerenja duž tri okomite osi odjednom. Dakle, tok brojeva koji uređaj proizvodi zapravo je projekcija magnetskog polja na tri osi u koordinatnom sustavu magnetometra. Ostali uređaji koji se koriste za pozicioniranje i navigaciju imaju isti format podataka: akcelerometar i žirotahometar (poznat i kao žiroskop). Slika prikazuje jednostavan slučaj gdje je kompas postavljen vodoravno u odnosu na površinu zemlje na ekvatoru. Crvena strelica označava smjer prema Sjevernom polu. Isprekidane linije označavaju projekcije ove strelice na odgovarajuće osi. Čini se da je to to! Krak je jednak tangenti suprotnog kuta. Da biste dobili kut smjera, morat ćete uzeti arktangens omjera krakova: H = atan(X/Y)
Prvo, uređaj koji se često naziva kompasom zapravo je magnetometar. Magnetometar je uređaj koji mjeri jakost magnetskog polja. Svi suvremeni elektronički magnetometri proizvedeni su korištenjem MEMS tehnologije i omogućuju mjerenja duž tri okomite osi odjednom. Dakle, tok brojeva koji uređaj proizvodi zapravo je projekcija magnetskog polja na tri osi u koordinatnom sustavu magnetometra. Ostali uređaji koji se koriste za pozicioniranje i navigaciju imaju isti format podataka: akcelerometar i žirotahometar (poznat i kao žiroskop). Slika prikazuje jednostavan slučaj gdje je kompas postavljen vodoravno u odnosu na površinu zemlje na ekvatoru. Crvena strelica označava smjer prema Sjevernom polu. Isprekidane linije označavaju projekcije ove strelice na odgovarajuće osi. Čini se da je to to! Krak je jednak tangenti suprotnog kuta. Da biste dobili kut smjera, morat ćete uzeti arktangens omjera krakova: H = atan(X/Y)
- Ako izvršimo ove jednostavne izračune, zapravo ćemo dobiti neki rezultat. Šteta je samo što još uvijek nećemo dobiti pravi odgovor, jer nismo uzeli u obzir hrpu faktora:
- Pomak i izobličenje vektora magnetskog polja Zemlje uslijed vanjskih utjecaja.
- Utjecaj nagiba i nagiba na očitanja kompasa.
U ovom ćemo članku proučiti te probleme i pronaći načine za njihovo rješavanje. Ali prvo, pogledajmo očitanja magnetometra vlastitim očima. Da bismo to učinili, moramo ih nekako vizualizirati.
Kao što znamo, slika vrijedi tisuću riječi. Stoga ćemo za veću jasnoću koristiti 3D editor za vizualizaciju očitanja magnetometra. U ove svrhe, možete koristiti SketchUp s dodatkom “cloud” (http://rhin.crai.archi.fr/rld/plugin_details.php?id=678) Ovaj dodatak vam omogućuje učitavanje nizova točaka iz datoteke pogleda u SketchUp: 212 -321 -515 211 -320 -515 209 -318 -514 213 -319 -516 Razdjelnik može biti tabulator, razmak, točka-zarez itd. Sve je to navedeno u postavkama dodatka. Tamo također možete tražiti da sve točke zalijepite trokutima, što u našem slučaju nije potrebno. Najlakši način za spremanje očitanja magnetometra je prijenos preko COM porta na osobno računalo na monitor serijskog porta, a zatim ih spremite u tekstualnu datoteku. Drugi način je spojiti SD karticu na Arduino i zapisati podatke magnetometra u datoteku na SD kartici. Nakon što smo se pozabavili snimanjem podataka i njihovim uvozom u SketchUp, pokušajmo sada provesti eksperiment. Rotirat ćemo magnetometar oko Z osi, a upravljački program u ovom trenutku će bilježiti očitanja senzora svakih 100 ms. Ukupno će se zabilježiti 500 bodova. Rezultat ovog eksperimenta prikazan je u nastavku: Što možete reći gledajući ovaj crtež? Prvo, može se vidjeti da je os Z doista fiksirana - sve točke nalaze se, više ili manje, u ravnini XY. Drugo, ravnina XY je malo nagnuta, što može biti uzrokovano ili nagibom mog stola ili nagibom Zemljinog magnetskog polja :) Sada pogledajmo istu sliku odozgo:
Što možete reći gledajući ovaj crtež? Prvo, može se vidjeti da je os Z doista fiksirana - sve točke nalaze se, više ili manje, u ravnini XY. Drugo, ravnina XY je malo nagnuta, što može biti uzrokovano ili nagibom mog stola ili nagibom Zemljinog magnetskog polja :) Sada pogledajmo istu sliku odozgo:  Prvo što upada u oči je da središte koordinata uopće nije u središtu ocrtane kružnice! Najvjerojatnije je izmjereno magnetsko polje nešto "pomaknuto" u stranu. Štoviše, to "nešto" ima napetost veću od one u prirodnom polju Zemlje. Drugo zapažanje je da je krug malo izdužen u visinu, što ukazuje na ozbiljnije probleme, o kojima ćemo govoriti u nastavku. Što se događa ako kompas rotirate oko svih osi u isto vrijeme? Tako je, rezultat nije krug, već kugla (točnije sferoid). Ovo je područje s kojim sam završio:
Prvo što upada u oči je da središte koordinata uopće nije u središtu ocrtane kružnice! Najvjerojatnije je izmjereno magnetsko polje nešto "pomaknuto" u stranu. Štoviše, to "nešto" ima napetost veću od one u prirodnom polju Zemlje. Drugo zapažanje je da je krug malo izdužen u visinu, što ukazuje na ozbiljnije probleme, o kojima ćemo govoriti u nastavku. Što se događa ako kompas rotirate oko svih osi u isto vrijeme? Tako je, rezultat nije krug, već kugla (točnije sferoid). Ovo je područje s kojim sam završio:  Uz glavnih 500 točaka sfere, dodana su još tri niza, svaki s 500 točaka. Svaka od dodanih skupina točaka odgovorna je za rotaciju magnetometra oko fiksne osi. Dakle, donji krug se dobiva rotiranjem uređaja oko osi Z. Krug s desne strane dobiva se rotiranjem oko osi Y. Konačno, gusti prsten točaka s lijeve strane odgovoran je za rotaciju magnetometra oko osi X. U nastavku pročitajte zašto ovi krugovi ne okružuju loptu duž ekvatora.
Uz glavnih 500 točaka sfere, dodana su još tri niza, svaki s 500 točaka. Svaka od dodanih skupina točaka odgovorna je za rotaciju magnetometra oko fiksne osi. Dakle, donji krug se dobiva rotiranjem uređaja oko osi Z. Krug s desne strane dobiva se rotiranjem oko osi Y. Konačno, gusti prsten točaka s lijeve strane odgovoran je za rotaciju magnetometra oko osi X. U nastavku pročitajte zašto ovi krugovi ne okružuju loptu duž ekvatora. 2. Magnetska inklinacija
Zapravo, posljednji crtež može izgledati malo čudno. Zašto, budući da je u vodoravnom stanju, senzor pokazuje gotovo maksimalnu vrijednost duž Z osi?? Situacija se ponavlja ako nagnemo uređaj, npr. s X osi prema dolje, opet dobivamo maksimalnu vrijednost (lijevi kružić). Ispada da na senzor stalno utječe polje usmjereno kroz senzor dolje na površinu zemlje! Tu zapravo nema ničeg neobičnog. Ova osobina zemljinog magnetskog polja naziva se magnetska inklinacija. Na ekvatoru je polje usmjereno paralelno sa zemljom. Na južnoj hemisferi - gore od zemlje pod određenim kutom. A na sjevernoj hemisferi, kao što smo već primijetili, prema dolje. Pogledajmo sliku. Magnetska inklinacija nas ni na koji način neće spriječiti u korištenju kompasa, pa o tome nećemo previše razmišljati, već samo zapamtite ovu zanimljivu činjenicu. Sada prijeđimo izravno na probleme.
Magnetska inklinacija nas ni na koji način neće spriječiti u korištenju kompasa, pa o tome nećemo previše razmišljati, već samo zapamtite ovu zanimljivu činjenicu. Sada prijeđimo izravno na probleme. 2.1. Izobličenje magnetskog polja: tvrdo i meko željezo
U stranoj literaturi distorzije magnetskog polja obično se dijele u dvije skupine: Hard Iron i Soft Iron. Ispod je slika koja ilustrira bit ovih distorzija. Tvrdo željezo Dajem vam potvrdu. Intenzitet zemljinog magnetskog polja jako ovisi o terestričkim koordinatama na kojima se mjeri. Na primjer, u Cape Townu (Južna Afrika) polje je oko 0,256 Gaussa, au New Yorku je dvostruko veće - 0,52 Gaussa. Na planeti kao cjelini intenzitet magnetskog polja varira u rasponu od 0,25 Gaussa do 0,65 Gaussa. Usporedbe radi, polje običnog magneta za hladnjak je 50 Gaussa, što je sto puta veće od magnetskog polja u New Yorku!! Jasno je da se osjetljivi magnetometar može lako zbuniti ako se jedan od ovih magneta pojavi u njegovoj blizini. Naravno, nema takvih magneta na quadcopteru, ali postoje mnogo snažniji magneti rijetke zemlje motora s prekidačim ventilom, kao i elektronički upravljački krugovi, žice za napajanje i baterija. Takvi izvori parazitskog magnetskog polja nazivaju se Hard Iron. Djelujući na magnetometar, oni daju određeni pomak izmjerenim vrijednostima. Da vidimo ima li naša sfera Hard Iron distorzije. Projekcija točaka sfere na XY ravninu izgleda ovako:
Tvrdo željezo Dajem vam potvrdu. Intenzitet zemljinog magnetskog polja jako ovisi o terestričkim koordinatama na kojima se mjeri. Na primjer, u Cape Townu (Južna Afrika) polje je oko 0,256 Gaussa, au New Yorku je dvostruko veće - 0,52 Gaussa. Na planeti kao cjelini intenzitet magnetskog polja varira u rasponu od 0,25 Gaussa do 0,65 Gaussa. Usporedbe radi, polje običnog magneta za hladnjak je 50 Gaussa, što je sto puta veće od magnetskog polja u New Yorku!! Jasno je da se osjetljivi magnetometar može lako zbuniti ako se jedan od ovih magneta pojavi u njegovoj blizini. Naravno, nema takvih magneta na quadcopteru, ali postoje mnogo snažniji magneti rijetke zemlje motora s prekidačim ventilom, kao i elektronički upravljački krugovi, žice za napajanje i baterija. Takvi izvori parazitskog magnetskog polja nazivaju se Hard Iron. Djelujući na magnetometar, oni daju određeni pomak izmjerenim vrijednostima. Da vidimo ima li naša sfera Hard Iron distorzije. Projekcija točaka sfere na XY ravninu izgleda ovako:  Može se vidjeti da oblak točaka ima primjetan pomak duž Y osi ulijevo. Gotovo da nema pomaka duž Z osi. Uklanjanje takvog izobličenja je vrlo jednostavno: dovoljno je povećati ili smanjiti vrijednosti primljene od uređaja za iznos pomaka. Na primjer, kalibracija tvrdog željeza za Y os bila bi: Ycal_hard = Y - Ybias Gdje Ycal_hard— kalibrirana vrijednost; Y— početna vrijednost; Ybias— vrijednost pomaka. Za izračun Ybias moramo popraviti maksimalnu i minimalnu vrijednost Y, a zatim upotrijebiti jednostavan izraz: Ybias = (Ymin-Ymax)/2 — Ymin Gdje Ybias— željenu vrijednost pomaka; Ymin— minimalna vrijednost osi Y; Ymax— najveća vrijednost osi Y. Meko željezo Za razliku od Hard Iron-a, Soft distorzija je puno podmuklija. Opet, pratimo ovu vrstu utjecaja na prethodno prikupljenim podacima. Da bismo to učinili, obratimo pozornost na činjenicu da lopta na gornjoj slici uopće nije lopta. Njegova projekcija na os YZ blago je spljoštena na vrhu i blago zarotirana u smjeru suprotnom od kazaljke na satu. Ta su izobličenja uzrokovana prisutnošću feromagnetskih materijala u blizini senzora. Takav materijal je metalni okvir kvadrokoptera, kućište motora, ožičenje ili čak metalni vijci za pričvršćivanje. Množenje očitanja senzora s određenim množiteljem pomoći će ispraviti situaciju s izravnavanjem: Ycal_soft = Y * Y skala Gdje Ycal_hard— kalibrirana vrijednost; Y— početna vrijednost; Yscale— faktor skaliranja. Kako biste pronašli sve koeficijente (za X, Y i Z), morate identificirati os s najvećom razlikom između maksimalne i minimalne vrijednosti, a zatim upotrijebiti formulu: Y skala = (Amax-Amin)/(Ymax-Ymin) Gdje Yscale— željeni koeficijent izobličenja duž Y osi; maks— najveća vrijednost na nekoj osi; Amin— minimalna vrijednost na nekoj osi; Ymax— najveća vrijednost na Y osi; Ymin- minimalna vrijednost na Y osi Još jedan problem, zbog kojeg se kugla pokazala rotiranom, malo je teže riješiti. Međutim, doprinos takvog izobličenja ukupnoj pogrešci mjerenja prilično je mali i nećemo detaljno opisivati metodu njegovog "ručnog" izravnavanja.
Može se vidjeti da oblak točaka ima primjetan pomak duž Y osi ulijevo. Gotovo da nema pomaka duž Z osi. Uklanjanje takvog izobličenja je vrlo jednostavno: dovoljno je povećati ili smanjiti vrijednosti primljene od uređaja za iznos pomaka. Na primjer, kalibracija tvrdog željeza za Y os bila bi: Ycal_hard = Y - Ybias Gdje Ycal_hard— kalibrirana vrijednost; Y— početna vrijednost; Ybias— vrijednost pomaka. Za izračun Ybias moramo popraviti maksimalnu i minimalnu vrijednost Y, a zatim upotrijebiti jednostavan izraz: Ybias = (Ymin-Ymax)/2 — Ymin Gdje Ybias— željenu vrijednost pomaka; Ymin— minimalna vrijednost osi Y; Ymax— najveća vrijednost osi Y. Meko željezo Za razliku od Hard Iron-a, Soft distorzija je puno podmuklija. Opet, pratimo ovu vrstu utjecaja na prethodno prikupljenim podacima. Da bismo to učinili, obratimo pozornost na činjenicu da lopta na gornjoj slici uopće nije lopta. Njegova projekcija na os YZ blago je spljoštena na vrhu i blago zarotirana u smjeru suprotnom od kazaljke na satu. Ta su izobličenja uzrokovana prisutnošću feromagnetskih materijala u blizini senzora. Takav materijal je metalni okvir kvadrokoptera, kućište motora, ožičenje ili čak metalni vijci za pričvršćivanje. Množenje očitanja senzora s određenim množiteljem pomoći će ispraviti situaciju s izravnavanjem: Ycal_soft = Y * Y skala Gdje Ycal_hard— kalibrirana vrijednost; Y— početna vrijednost; Yscale— faktor skaliranja. Kako biste pronašli sve koeficijente (za X, Y i Z), morate identificirati os s najvećom razlikom između maksimalne i minimalne vrijednosti, a zatim upotrijebiti formulu: Y skala = (Amax-Amin)/(Ymax-Ymin) Gdje Yscale— željeni koeficijent izobličenja duž Y osi; maks— najveća vrijednost na nekoj osi; Amin— minimalna vrijednost na nekoj osi; Ymax— najveća vrijednost na Y osi; Ymin- minimalna vrijednost na Y osi Još jedan problem, zbog kojeg se kugla pokazala rotiranom, malo je teže riješiti. Međutim, doprinos takvog izobličenja ukupnoj pogrešci mjerenja prilično je mali i nećemo detaljno opisivati metodu njegovog "ručnog" izravnavanja. 2.2. Automatska kalibracija
Mora se reći da ručno dobivanje točnih minimalnih i maksimalnih očitanja magnetometra nije lak zadatak. Za ovaj postupak trebat će vam najmanje poseban stalak u koji se može učvrstiti jedna od osi uređaja. Mnogo je lakše koristiti algoritam za automatsku kalibraciju. Bit ove metode je aproksimacija oblaka dobivenih točaka elipsoidom. Drugim riječima, odabiremo parametre elipsoida na takav način da se što točnije podudaraju s našim oblakom točaka konstruiranim na temelju očitanja magnetometra. Iz ovako odabranih parametara možemo dobiti vrijednost pomaka, faktore mjerila i koeficijente za ortogonalizaciju osi. Na Internetu možete pronaći nekoliko programa prikladnih za to. Na primjer, MagCal ili još jedan - Magneto. Za razliku od MagCala, u Magnetu se izračunati parametri izlaze u obliku spremnom za korištenje, bez potrebe za dodatnim transformacijama. Ovo je program koji ćemo koristiti. Glavni i jedini oblik programa izgleda ovako: U polju "Sirova magnetska mjerenja" odaberite datoteku s izvornim podacima. U polje "Norma magnetskog ili gravitacijskog polja" unesite vrijednost Zemljinog magnetskog polja u točki naše dislokacije. S obzirom da ovaj parametar ni na koji način ne utječe na kut otklona igle našeg virtualnog kompasa, postavio sam vrijednost na 1090, što odgovara vrijednosti od 1 Gaussa. Zatim kliknite gumb Kalibriraj i dobit ćete:
U polju "Sirova magnetska mjerenja" odaberite datoteku s izvornim podacima. U polje "Norma magnetskog ili gravitacijskog polja" unesite vrijednost Zemljinog magnetskog polja u točki naše dislokacije. S obzirom da ovaj parametar ni na koji način ne utječe na kut otklona igle našeg virtualnog kompasa, postavio sam vrijednost na 1090, što odgovara vrijednosti od 1 Gaussa. Zatim kliknite gumb Kalibriraj i dobit ćete: - vrijednosti pomaka za sve tri osi: kombinirani prednapon (b);
- i matrica mjerila i ortogonalizacije: Ispravak za kombinirane faktore mjerila, neusklađenosti i meko željezo (A-1).
3. Utjecaj nagiba magnetometra na izračunati smjer
Sljedeći je problem broj dva. Na početku članka već smo pokušali izračunati kut između sjevera i igle kompasa. Za to funkcionira jednostavna formula: H = atan(Y/X) Gdje H— kut odstupanja igle kompasa od smjera sjevera; X,Y— kalibrirane vrijednosti magnetometra. Sada zamislite da fiksiramo os X strogo u smjeru sjevera i počnemo okretati senzor oko ove osi (dajemo valjak). Ispada da projekcija polja na X os ostaje nepromijenjena, ali se mijenja projekcija na Y os. Prema formuli, igla kompasa će pokazivati ili na sjeverozapad ili na sjeveroistok, ovisno o tome u kojem smjeru se nagnemo. Ovo je drugi problem elektroničkog kompasa, naveden na početku članka. Geometrija će pomoći u rješavanju problema. Samo trebamo rotirati magnetski vektor u koordinatni sustav koji određuje inklinometar. Da bismo to učinili, naizmjenično množimo dvije matrice kosinusa s vektorom: Vcal2 = Ry*Rx*Vcal Gdje Vcal— magnetski vektor, očišćen od tvrdih i mekih izobličenja; Rx I Ry— matrice rotacije oko X i Y osi; Vcal2— magnetski vektor, očišćen od utjecaja kotrljanja i nagiba. Formula prikladna za program kontrolera izgledat će ovako: Xcal2 = Xcal*cos(nagib) + Ycal*sin(nagib)*sin(nagib) + Zcal*cos(nagib)*sin(nagib) Ycal2 = Ycal*cos(roll) — Zcal*sin(roll) H = atan2(-Ycal2, Xcal2) Gdje svitak I visina tona— nagibi oko X i Y osi; Xcal, Ycal, Zcal— vektor magnetometra (Vcal); Ycal2, Ycal2- kalibrirane vrijednosti magnetometra (ne računamo Zcal2 - neće nam trebati); H- kut između sjevera i igle kompasa. (Ovdje možete saznati tko je atan2: http://en.wikipedia.org/wiki/Atan2)3. Razlika između geografskih i magnetskih polova
Nakon što smo dobili koliko-toliko točan kut odstupanja igle kompasa od smjera sjevera, vrijeme je da otklonimo još jedan problem. Činjenica je da se magnetski i geografski polovi na našem planetu jako razlikuju, ovisno o tome gdje vršimo mjerenje. Drugim riječima, "sjever" na koji pokazuje vaš planinarski kompas uopće nije sjever gdje ima leda i polarnih medvjeda. Da bi se izjednačile te razlike, određeni kut koji se naziva magnetska deklinacija mora se dodati (ili oduzeti) očitanjima senzora. Na primjer, u Jekaterinburgu magnetska deklinacija ima vrijednost od +14 stupnjeva, što znači da bi izmjerena očitanja magnetometra trebala biti smanjena za istih 14 stupnjeva. Da biste saznali magnetsku deklinaciju u svojim koordinatama, možete koristiti poseban resurs: http://magnetic-declination.com/Zaključak
Na kraju, nekoliko savjeta za navigaciju s magnetometrom.- Kalibracija se mora provesti točno u uvjetima u kojima će dron letjeti u stvarnom životu.
- Magnetometar je bolje nositi izvan tijela robota na šipki. Na taj će način biti manje buke.
- Za izračun smjera bolje je koristiti kombinaciju kompas + žiroskop. U tom se slučaju njihova očitanja miješaju prema određenom pravilu (fuzija podataka).
- Ako je riječ o zrakoplovu s velikom brzinom kursa, preporučuje se korištenje kombinacije kompas + žiroskop + GPS.
Dobar dan. Kreatori često ugrađuju kompas u mobilne telefone. Ali nemaju svi korisnici pametnih telefona pojma što je to i zašto je to potrebno. Stoga ćemo u ovom članku pokušati pobliže pogledati ovaj telefonski program, a ako ga vaš uređaj nema, pogledat ćemo kako ga preuzeti.
Koje vrste kompasa postoje?
Svi se sjećamo što je kompas iz školskog tečaja geografije. No, zaronimo dublje u ovo pitanje. Ljudi su smislili razne uređaje koji im omogućuju da razumiju gdje su polovi. Glavna stvar u ovom pitanju je razumjeti gdje je sjever. Zatim, znajući lokaciju sjevernog pola, možete saznati gdje su drugi smjerovi svjetlosti. Zašto nam ovo treba? Da se ne izgubite u okolici. Na primjer, u šumi, na polju ili dok ste na jahti na moru.
Na primjer, znate li kako odrediti stupove u šumi, imajući pri ruci običnu iglu? Morate pažljivo staviti malu iglu na sloj vode (na površini vode je tanak sloj; po njemu trče stonoge), ili je možete jednostavno staviti na mali list biljke (ili mali papir).

Sam list pažljivo stavite na vodu u porculanskom (plastičnom) tanjuru (ili u lokvi, ako ste u šumi). Dakle, jedan kraj igle će uzeti smjer sjever, drugi, jug. Vrlo je jednostavno. Zašto sam ovo rekao? Ova vam metoda može puno pomoći ako ste u nepoznatom području i ne znate smjer strana. Nemate kompas, ali postoji mala lokvica i obična igla! Sve što trebate učiniti je otkriti koji kraj igle pokazuje na sjever!
Vrste kompasa
Magnetski - poznati kompas iz škole. Njegova se bit svodi na određivanje magnetskog sjevernog pola na temelju magnetskog polja. Nadalje, na temelju razmjera uređaja mogu se lako odrediti preostali dijelovi svijeta.
Ima vrlo lijepih kompasa koje je užitak nositi. Na primjer, kupite prekrasan Eyeskey Professional kompas

možete ovdje. Dostava je besplatna i postoji mnogo opcija. Ovaj na slici poklonio sam prijatelju za rođendan. Strastveni je ribolovac. Bio je oduševljen kompasom.
Elektromagnetski

Bit njegovog rada je stvaranje polja zbog kretanja uređaja u prostoru. Ugrađuje se u razna vozila, poput brodova, aviona i drugih mehanizama. Postoji jedan uvjet da kompas počne funkcionirati: kretanje ovog mehanizma je neophodno. Bez kretanja, elektricitet se neće pojaviti, a njegova vrijednost neće pokazati potrebne podatke na uređaju.
Digitalni kompas
Njegovo djelovanje je slično varijanti uobičajenog klasičnog. Razlika je u tome što nema iglu, već ima senzor koji koristi magnetsko polje. Podaci sa senzora idu na brojčanik. Takvi kompasi često imaju druge značajke. Vrlo često takvi uređaji mogu mjeriti korake i krvni tlak. Može raditi kao barometar, sat itd. Mana je što se baterija isprazni.

Na primjer, ovaj na snimci zaslona također je barometar. Više o tome pročitajte na poveznici...
Radio kompas

Ova vrsta kompasa ne zahtijeva magnetsko polje. Zbog činjenice da podaci dolaze izravno iz posebnih tornjeva. Ranije se sličan mehanizam često koristio u zrakoplovima. No, odnedavno se sve više napuštaju, budući da su razlike u informacijama zbog izobličenja radio valova postale sasvim uobičajene.
Satelit

Kao što naziv govori, prima podatke s posebnih satelita. Zanimljivo je da ova vrsta kompasa ne pokazuje smjer prema magnetskim polovima, već prema stvarnim, geografskim polovima. Drugim riječima, najprecizniji je. Ali postoje i nedostaci. U lošem vremenu informacije mogu biti iskrivljene. Također, informacija možda neće biti točna ako je osoba pod zemljom.
Upravo se ova vrsta kompasa, zajedno s digitalnim, ugrađuje u telefone i razne tablete. Oni primaju signale izravno sa satelita. Danas je u većini pametnih telefona ova vrsta kompasa ugrađena prema zadanim postavkama. Drugim riječima, nema potrebe preuzimati ga s raznih servisa. Samo uđite u postavke i aktivirajte ovu funkciju.

Također, ovaj kompas je često neraskidivo povezan s navigatorom u telefonu. Ako imate navigator na mobitelu, onda je, naravno, tu i kompas.

Ako vaš telefon nema ovaj program, možete besplatno preuzeti kompas s play.google.com. Na slici vidite Compass Galaxy.

Ako niste zadovoljni ovim modelom, na istoj stranici postoje i druge opcije za telefonski kompas. Odaberite onu koja vam se najviše sviđa.
Važno:— Ne znam koji model telefona imate. Ali da bi kompas radio u vašem telefonu, vaš gadget mora imati instaliranu funkciju magnetskog senzora. Ako ga nema, morate se spojiti na GPS geolokaciju. Ili, drugim riječima, spojite magnetski žiroskop. Naravno, ako vaš model telefona to dopušta, što možete saznati iz njegovih uputa. Sretno!
Zbog široke upotrebe mobilne platforme Android i GPS čipova posebno u finalnim proizvodima, zainteresirala me ideja o radu digitalnog kompasa, oko koje se sada postavlja toliko pitanja.
Dakle, predmet koji razmatramo je kompas, koji se temelji na principu konstrukcije na određivanju koordinata pomoću satelitskih navigacijskih sustava. Međutim, u praksi postoje slučajevi kada kompas kao prijemnik sadrži blok magnetootpornika (princip promjene otpora ovisno o položaju objekta u apsolutnom prostoru) ili Hallove elemente. Hallovi elementi izgrađeni su na bazi mikromehaničkih sustava koji su vrlo osjetljivi na promjene magnetskog polja u konkretnom slučaju promjene raspodjele naboja na silicijskoj pločici pod utjecajem magnetskog polja Zemlje. Uređaji temeljeni na magnetootpornicima i Hallovim elementima predstavljaju kompas u svom klasičnom obliku, kao autonomni mjerni instrument, za razliku od sustava "kolektivnog" tipa, za koje ulazne informacije dolaze izravno u obliku satelitskog signala. Kao rezultat toga, sustavi temeljeni na vanjskom izvoru informacija u biti su uređaji s indikacijom kuta smjera u obliku kompasa.
Budući da se u praksi najčešće bavimo određivanjem lokacije i smjera putem navigacijskih sustava, primjer za to je Android sa svojom aplikacijom google maps, princip rada algoritma je sljedeći upravo za takav slučaj korištenja:
1. Na temelju signala sa satelita očitavamo koordinate prijemnika satelitskog navigacijskog sustava (i, sukladno tome, objekta)
2. Bilježimo trenutak u kojem su koordinate određene.
3. Čekamo određeno vrijeme, dovoljno kratko za bolje rezultate.
4. Ponovno se određuje lokacija objekta.
5. Rješava se najjednostavniji navigacijski problem izračunavanja vektora brzine kretanja iz dobivenih koordinata dviju točaka i veličine vremenskog intervala, nakon čega se, poznavajući vektor, lako dobiva:
a) smjer kretanja
b) brzinu kretanja
6. Idite na korak 2.
Kao što vidimo, rad algoritma je osiguran ciklički i početna točka za početak sljedećeg vektora bit će kraj vektora vodiča za posljednji vremenski interval.
Nedostaci ove metode pri korištenju digitalnog kompasa:
ako je objekt nepomičan u apsolutnom prostoru, smjer kretanja se ne može odrediti; koordinatne fiksacijske točke se u ovom slučaju podudaraju.
Iznimno postoje prilično veliki objekti (na primjer, velika morska plovila), gdje je moguće ugraditi 2 prijemnika (na primjer, na pramcu i krmi). Dakle, koordinate dviju točaka mogu se dobiti odmah, čak i ako objekt miruje, i prijeći na korak 5.
Također je potrebno uzeti u obzir točnost određivanja koordinata satelitskim sustavima za pozicioniranje i njegov utjecaj na objekte koji se sporo kreću zbog širenja lokacijskih pogrešaka.
Do nedavno u geodezija Uglavnom su se koristili kompasi i kompasi, gdje je osjetljivi element magnetizirana igla koja se okreće na šipki i koristi se u raznim modifikacijama ovih uređaja nekoliko tisućljeća. Kada je usmjerena, igla zauzima takav položaj da njezina ravnina postaje paralelna s linijama magnetskog polja koje prolaze na određenom mjestu. Ako igla ima dva stupnja slobode, odnosno može se okretati u vodoravnoj i okomitoj ravnini, tada će smjer u kojem je igla usmjerena pokazati i deklinaciju i nagib lokalnog geomagnetskog polja. U mnogim instrumentima, kako bi igla točno pokazivala smjer prema sjevernom magnetskom polu, obično se balansira posebno za karakteristike magnetskog polja regije u kojoj će se koristiti kompas.
Globalno uravnoteženi kompasi se ponekad koriste i mogu se koristiti diljem svijeta. Da bi se ublažile vibracije igle tijekom kretanja, kompas se napuni tekućinom (mješavina vode s alkoholom ili rafiniranim uljem). Očitanja takvih uređaja opterećena su pogreškama zbog utjecaja vanjskih utjecaja, poput vibracija, nagiba, ubrzanja i vanjskih magnetskih polja. Tradicionalne kompase i kompase teško je prilagoditi digitalnom očitavanju, pa ih je stoga teško koristiti u kombinaciji s najnovijim geodetski instrumenti.
U modernom elektronički kompasi koristi se kao osjetni element magnetometri, koji su poput kompasa analogni instrumenti i mjere intenzitet jedne ili više komponenti Zemljinog magnetskog polja u točki na kojoj se ono nalazi. Signali s izlaza magnetometra pretvaraju se u digitalni oblik i mogu se koristiti za daljnju obradu pomoću mikroprocesora. Moderni instrumenti uglavnom koriste magnetometre koji koriste magnetootporne, magnetoinduktivne senzore, senzore s Hallovim efektom i senzore s fluksgateom. Za orijentaciju se obično koristi elektronički kompas koji ima dva magnetometra postavljena u vodoravnoj ravnini pod pravim kutom jedan prema drugome za mjerenje jedne od komponenti magnetskog polja B x ili B y, odnosno duž x-osi ili duž y-os. Kut između x-osi i magnetskog meridijana bit će jednak:
ψ = arctan(B y / Bx). (7.1)
Moderni magnetometri su malih dimenzija i ugrađeni su u integrirane sklopove.
U nekim geodetski instrumenti ugrađeni su anizotropni magnetorezistivni (AMP) senzori, koji su posebni otpornici izrađeni od tankog permalloy filma, čiji se vektor magnetizacije, kada je izložen vanjskom magnetskom polju, počinje okretati ili mijenjati kut, mijenjajući otpor filma. Tijekom mjerenja takav se film postavlja u Whitsonov most i procjenjuje se promjena napona uzrokovana promjenom otpora filma, što se koristi za procjenu jakosti magnetskog polja. Magnetootporni senzori daju točnost veću od jednog stupnja i mogu imati jednu, dvije ili tri osi i ugrađeni su u elektroničke kompase.
Treba napomenuti da mnogi satelitski prijemnici imaju slične ugrađene elektroničke kompase. Satelitski prijamnici obično koriste dvoosni kompas, au nekim slučajevima i troosne senzore smjera, koji mogu dati prilično točne upute čak i pri blagim nagibima. U slučaju kada se satelitski prijamnik kreće brzinom većom od 10 km/h, on iz satelitskih promatranja može odrediti smjer svog kretanja s pogreškom manjom od jednog stupnja. Pri manjim brzinama GPS prijamnik s jednom antenom nije u stanju odrediti smjer kretanja. Stoga je prijemnik konfiguriran tako da kada postigne određenu brzinu (na primjer, 5 ili 10 km na sat), prebacuje se s funkcije kompasa na funkciju smjera dobivenu satelitskim opažanjima samog GPS prijamnika, a kada brzina se smanjuje prijemnik se vratio u smjer kompasa.
Kako bi satelitski prijamnik mogao izračunati i zemljopisne (prave) i magnetske azimute gibanja, u prijemnik je ugrađen softver koji sadrži parametre modela glavnog geomagnetskog polja Zemlje. Prijemnik kontinuirano ažurira informacije o smjeru prema objektu dok se korisnik kreće nasumičnim putem do objekta.
Magnetoinduktivni senzori smjera pojavili su se relativno nedavno - prvi patent za njih izdan je 1989. Načelo njegovog rada temelji se na činjenici da oscilator koristi zavojnicu, čiji se induktivitet mijenja pod utjecajem promjena u okolnom magnetskom polju. Promjena induktiviteta zavojnice uzrokuje promjenu frekvencije generatora. Dakle, ova vrsta magnetometra mjeri magnetsko polje njegovim učinkom na induktivitet svitka žice ili solenoida.
Za određivanje smjera prema sjevernom magnetskom polu (u vodoravnoj ravnini), dva takva senzora, postavljena okomito jedan na drugi, montiraju se na kardan tako da se nalaze u vodoravnoj ravnini, au troosnoj inklinometar također se koristi. Mnogi moderni automobilski kompasi temelje se na magnetskim induktivnim senzorima.
Kad odete izvan grada, poznata stvar poput pametnog telefona više ne pomaže. Potreban vam je pouzdan uređaj koji vam pomaže u snalaženju u prostoru (a ponekad iu vremenu), kao iu dobivanju drugih važnih informacija. Štoviše, uređaj bi trebao biti što lakši, kompaktniji i, što se toga tiče, višenamjenski. Ovaj digitalni kompas je upravo to. S njim (i s napunjenim baterijama na zalihi) nećete se izgubiti, točno ćete odrediti točku na kojoj se nalazite, što znači da ćete razumjeti kamo dalje.
Uređaj teži znatno manje od 100 grama, udobno i lako leži u ruci, ima nekoliko ugrađenih senzora, zaslon s tekućim kristalima i mogućnost spremanja povijesti najnovijih snimljenih podataka (do 8 pozicija). Praktično vezice za vješanje oko vrata i LED element za osvjetljenje u mraku nadopunjuju osnovne mogućnosti na udobnu razinu.
Ugrađene značajke:
- gledati;
- kalendar;
- termometar;
- barometar;
- visinomjer;
- kompas;
- vremenski senzor.
A sve zajedno omogućuje ne samo određivanje koordinata vaše lokacije, već i iscrtavanje točnog kursa do vašeg odredišta.
Sat i kalendar
S ovim brojalicama koje i djeca razumiju sve je jednostavno. Nakon što postavite točan datum i vrijeme i pratite trenutni trenutak. Možete odabrati 12- ili 24-satni format prikaza vremena. Pritiskom na tipku SET omogućuje vam pomicanje od vremena do datuma. Dugi pritisak na tipku SET omogućuje vam ulazak u mod postavki, u kojem možete postaviti datum/vrijeme, kao i odabrati uobičajene mjerne jedinice.
Termometar
Temperatura se može prikazati u Celzijusu ili Fahrenheitu. Postoji i nekoliko opcija za određivanje vremenskih uvjeta za blisku budućnost: vedro, pretežno oblačno, oblačno i oborina. Informacije se ažuriraju svakih 30 sekundi.
Barometar
Vrijednost atmosferskog tlaka, kao i vrijeme s datumom i trenutnom temperaturom, prikazuje se na zaslonu u standardnom načinu rada. Informacije se ažuriraju svakih 30 sekundi. Ako trebate precizne podatke, morate pritisnuti i držati tipke SET i ALTI. Atmosferski tlak može se prikazati u milimetrima živinog stupca ili hekto-paskalima.
Visinomjer
Pritiskom na tipku ALTI prelazite u način rada mjerenja apsolutne visine (ABS). Podaci se ažuriraju svakih 5 sekundi. Držanjem pritisnute tipke ALTI prebacuje se na način usporednog mjerenja nadmorske visine (REL), a očitanja se vraćaju na 0. Visina se može mjeriti iu metrima i u stopama.
Kompas
Pritiskom na tipku COMP možete se prebaciti na kompas. Držanjem iste tipke prelazite u testni mod. Kako to učiniti detaljno je opisano u priloženim uputama. Kada mjerite smjer, držite kompas podalje od magnetskih polja. Do izobličenja može doći zbog drugih magneta u blizini, kao i predmeta od željeza i čelika.
Općenito, s takvim ručnim elektroničkim pomoćnikom nećete se izgubiti. Podsjetimo još jednom na opskrbu baterijama. Ovdje se koriste "oni za mali prst".
Poklon za putnika
Takvu korisnu stvar, naravno, cijenit će oni koji vole dugo planinariti, posebno u planinskim područjima. Mogao bi koristiti i pedometar i višenamenski alat 4 u 1. Višenamenski alat ima snažnu svjetiljku, noćnu svjetiljku, ventilator i glazbeni uređaj (reproducira MP3 datoteke i radio). Vrlo je korisno tijekom zaustavljanja iu mraku.
Karakteristike
- 7 u 1: sat, kalendar, termometar, vremenski senzor, kompas, visinomjer, barometar;
- uključene upute;
- LCD zaslon;
- LED pozadinsko osvjetljenje 5 sekundi;
- spremanje i pregled povijesti prethodnih vrijednosti;
- dimenzije: 6,5 x 2,5 x 10 cm;
- težina: 85 g;
- period ažuriranja podataka: 30 sekundi;
- raspon temperature: -10°C do 50°C (14-122°F);
- raspon nadmorske visine: -305 m do 9.144 m (-1.000 do 30.000 ft);
- raspon atmosferskog tlaka: od 225 mm Hg do 788 mm Hg (301-1,051 hPa);
- radi na 2 AAA (“pinky”) baterije (nisu uključene);
- postoji čipka;
- marka: LeFutur;
- pakiranje: markirana kutija;
- dimenzije kutije: 7 x 11 x 3 cm.